Istotą funkcjonowania obrabiarek CNC jest przyjęcie założenia o istnieniu pewnego układu współrzędnych, w którym odbywa się sterowanie. Jest to najprostszy sposób na określanie względnych położeń narzędzia i przedmiotu obrabianego, wymaganych dla przeprowadzenia obróbki i uzyskania odpowiednich jej rezultatów. Pojęcie numeryczny należy więc obecnie kojarzy ze współrzędnymi (o wartościach liczbowych, numerycznych).
Podstawowym układem współrzędnych w obrabiarkach sterowanych numerycznie jest układ prostokątny kartezjański. Początek układu współrzędnych można zdefiniować dowolnie w przestrzeni obróbkowej obrabiarki. Przy definicji układów współrzędnych (dotyczy to przede wszystkim układu bazowego i przedmiotu) są stosowane pewne zasady, pozwalające na ich unifikacje. Zasady te zawarte są w polskiej normie M-55251:
-
Układ osi współrzędnych i ruchy w kierunkach tych osi ustala się tak, że przemieszczenia mogą być opisane przez programistę niezależnie od tego czy ruch wykonuje narzędzie przy nieruchomym przedmiocie czy odwrotnie.
-
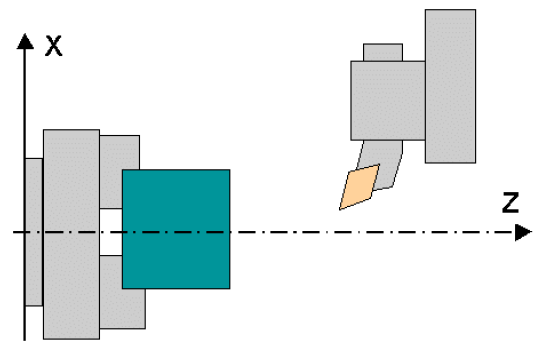
Podstawowy układ osi współrzędnych jest układem prostokątnym prawoskrętnym odniesionym do przedmiotu obrabianego zamocowanego na obrabiarce. Osie współrzędnych układu podstawowego powinny być równoległe do głównych prowadnic obrabiarki (rys. 4.8).
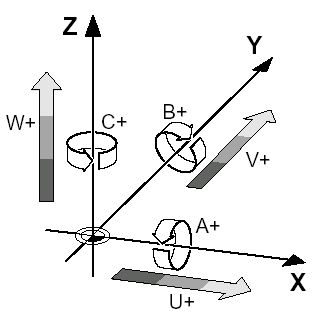
Podstawowy układ współrzędnych [8].
Za podstawowe przyjmuje się nazwy osi liniowych X, Y i Z. W szczególnych przypadkach osie mogą przyjmować inne nazwy, np. U, V, W, P, Q,
Sterowane numerycznie osie obrotowe przyjmują nazwy A, B, C. Są one związane z osiami liniowymi (A obrót wokół X, B wokół Y, C wokół Z). Zwroty dodatnie przyjmuje się zgodnie z regułą śruby prawoskrętnej, zasady prawej ręki (rys. 4.9).
Jeżeli osie związane są z ruchem przedmiotu obrabianego przyjmują indeks ’ (np. X’) i zwrot przeciwny do zwrotu danej osi sterowanej numerycznie (np. X) [12].
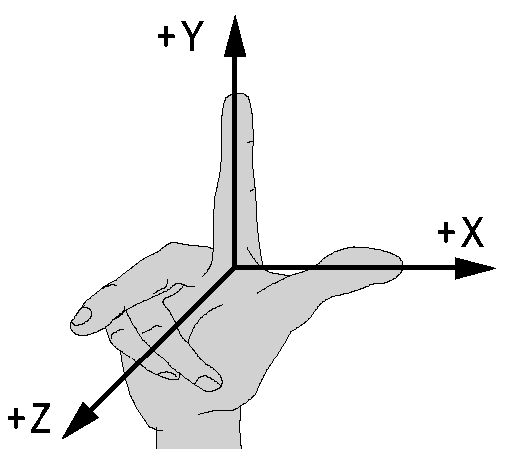
Wyznaczanie zwrotów osi zgodnie z regułą prawej dłoni [6].
Zdefiniowanie układu współrzędnych wymaga podania nst. danych:
-
kierunek osi,
-
zwrot osi,
-
punkty zerowe i charakterystyczne obrabiarki.
W obrabiarkach sterowanych numerycznie można wyróżnić układy współrzędnych związane z przedmiotem obrabianym, układem sterowania i maszyny (rys. 4.10) [2].
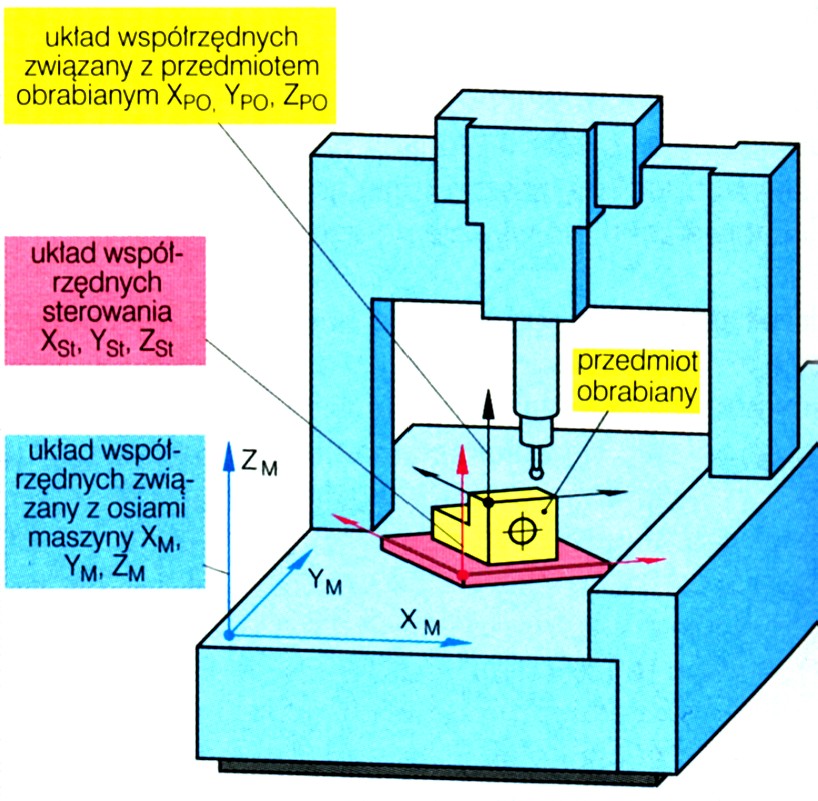
Układy współrzędnych w obrabiarkach sterowanych numerycznie [].
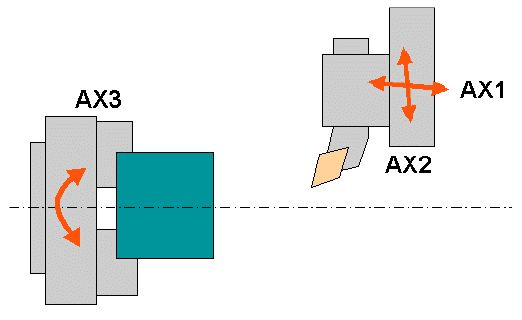
Maszynowy układ współrzędnych (rys. 4.11) - układ maszynowy może być układem prostokątnym, walcowym, sferycznym lub o złożonym charakterze (np. w robotach). Układ maszynowy jest odniesiony do konstrukcji konkretnej obrabiarki i nie jest objęty normami. W układzie maszynowym są podane współrzędne punktu referencyjnego (R), punkty wymiany narzędzi, punkty wymiany palet itp. Osie maszynowego układu współrzędnych mogą być oznaczane kolejnymi cyframi (1, 2, 3.., AX1, AX2,....) lub oznaczeniami podobnymi do osi pozostałych układów współrzędnych (np. X, Y, Z, X1, Y1, Z1). Układ maszynowy jest układem rzeczywistym (rys. 4.11b), tj. obarczonym różnego rodzaju błędami wykonawczymi – nieprostoliniowość osi, nieprostopadłość osi, błędy podziałki itp. - rys. 4.11. Obróbka przy wykorzystaniu takiego układu wyklucza uzyskanie wysokiej jakości produktów. Jeżeli jednak wspomniane błędy są znane przez układ sterowania to drogą programową mogą zostać skompensowane (nie jest to możliwe na obrabiarkach konwencjonalnych) [6].
a)
|
b)
|

Maszynowy układ współrzędnych: a) teoretyczny, b) rzeczywisty [6].
Bazowy (podstawowy) układ współrzędnych - prostokątny, prawoskrętny układ współrzędnych, stanowiący podstawę do programowania (rys. 4.12). Jest odniesiony do przedmiotu zamocowanego na obrabiarce, traktowanego jako nieruchomy, przy poruszającym się narzędziu (zakłada się względny ruch narzędzia względem przedmiotu obrabianego). Jest związany z układem maszynowym poprzez transformacje kinematyczne, odwzorowujące układ bazowy na osie maszynowe (np. osie sferycznego układu współrzędnych robota, transformacja we frezarce 5-osiowej itp.). W najprostszym przypadku układ bazowy (tokarki, frezarki) jest tożsamy z układem maszynowym - brak transformacji kinematycznych. W tym układzie są definiowane korektory narzędziowe, wyznaczana jest kompensacja promienia narzędzia, wyznaczane są transformacje układu przedmiotu, ustawiane są granice obszaru obróbki oraz wykonywane są wszystkie obliczenia toru ruchu narzędzia. Służy on zatem przede wszystkim układowi CNC. Wymagania stawiane układowi bazowemu są unormowane. Układ bazowy jest zdefiniowany przez producenta układu sterowania, zadaniem producenta obrabiarki, którą on steruje, jest powiązanie układu maszynowego i bazowego (poprzez tzw. dane maszynowe) [6].
Bazowy układ współrzędnych [6].
Układ współrzędnych przedmiotu prostokątny, prawoskrętny układ współrzędnych, związany z przedmiotem obrabianym, służący do programowania obróbki, zapisanej w postaci programu sterującego (Rys. 3.19). Jest przekształconym układem bazowym poprzez definicją tzw. FRAMES, będących matematycznymi formułami matematycznymi, przekształcającymi układy współrzędnych z wykorzystaniem czterech podstawowych działań:.
-
translacji o wektor,
-
obrotu wokół osi,
-
symetrii osiowej (odbicia lustrzanego),
-
skalowania osi.
Zapis matematyczny tych działań jest realizowany z wykorzystaniem rachunku macierzowego. Wybór układu współrzędnych przedmiotu zależy od sposobu jego wymiarowania, możliwe jest użycie w jednym programie sterującym kilku różnych układów współrzędnych przedmiotu [6].
Nowoczesne obrabiarki umożliwiają parametryzowanie programu danymi określonymi w bazowym układzie współrzędnych, dzięki czemu realizacja programu NC jest uniezależniona od aktualnego zamocowania przedmiotu obrabianego. Aktualne współrzędne są przeliczane, dzięki transformacji współrzędnych, na współrzędne związane z obrabiarką i narzędziem. Zasada bazy współrzędnych umożliwia dopasowanie współrzędnych w sześciu stopniach swobody, a mianowicie translacji (przemieszczeń liniowych) w trzech kierunkach i rotacji (przemieszczeń obrotowych) wokół trzech osi.
W takim przypadku niezbędne jest przeliczanie zależności pomiędzy współrzędnymi przemierzeń liniowych i obrotowych w układzie maszynowym względem bazowego układu współrzędnych (rys. 4.13).
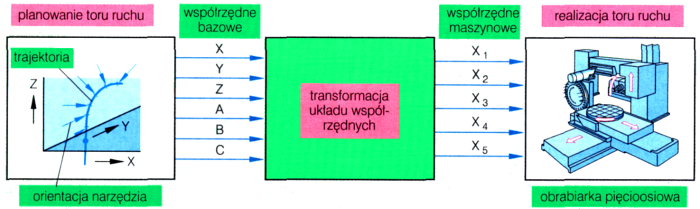
Transformacja układów współrzędnych [2].
Obok problemu dokładności transformacji i nakładu czasu na obliczenia, istniej jeszcze problem niejednoznaczności przekształceń (w przypadku maszyn pięcio- i sześcioosiowych zazwyczaj kilka różnych ustawień osi zapewnia takie samo pozycjonowanie i zorientowanie narzędzia).
Porównanie obrabiarek konwencjonalnych i wyposażonych w system sterowania CNC
"